Process
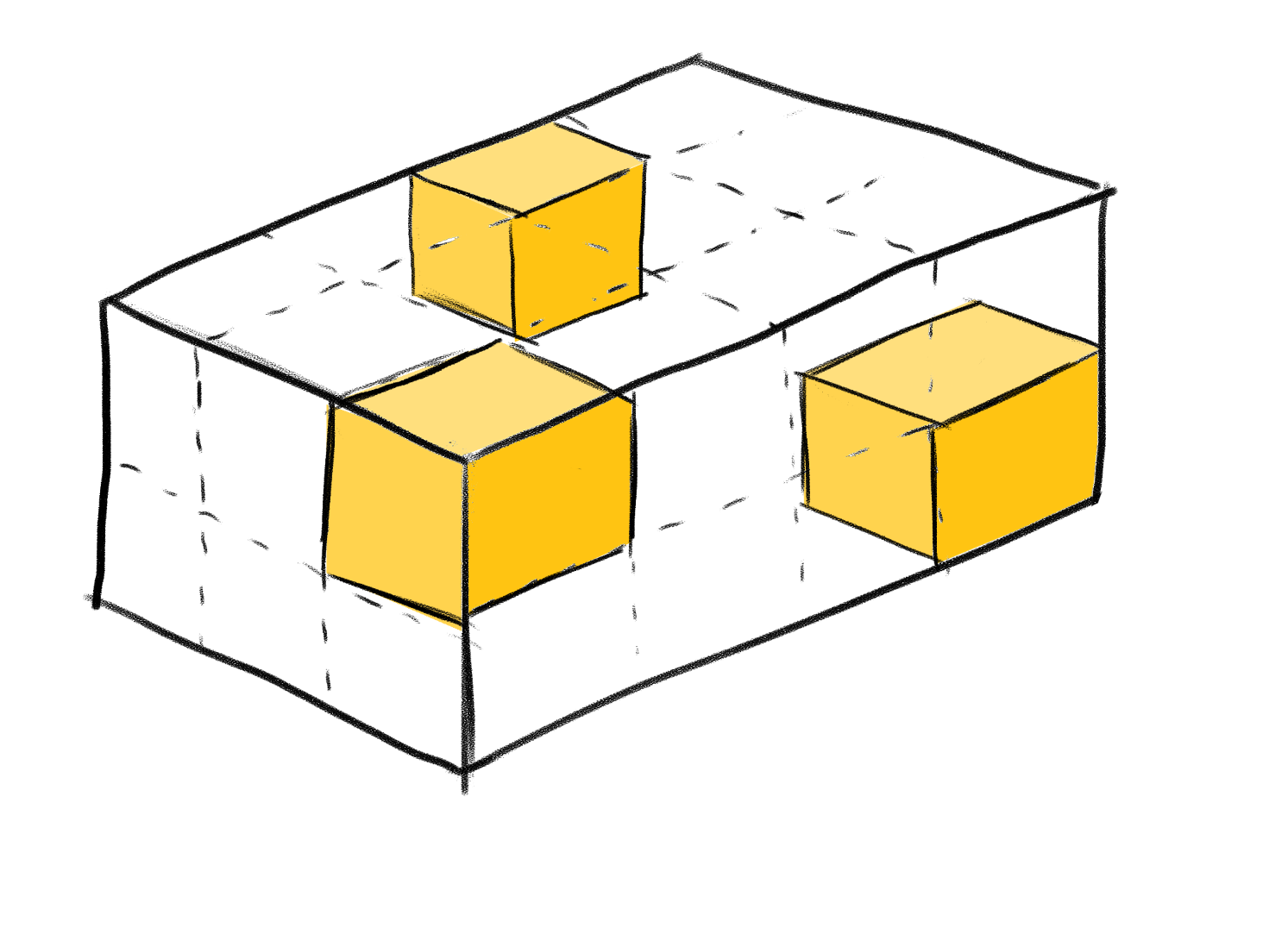
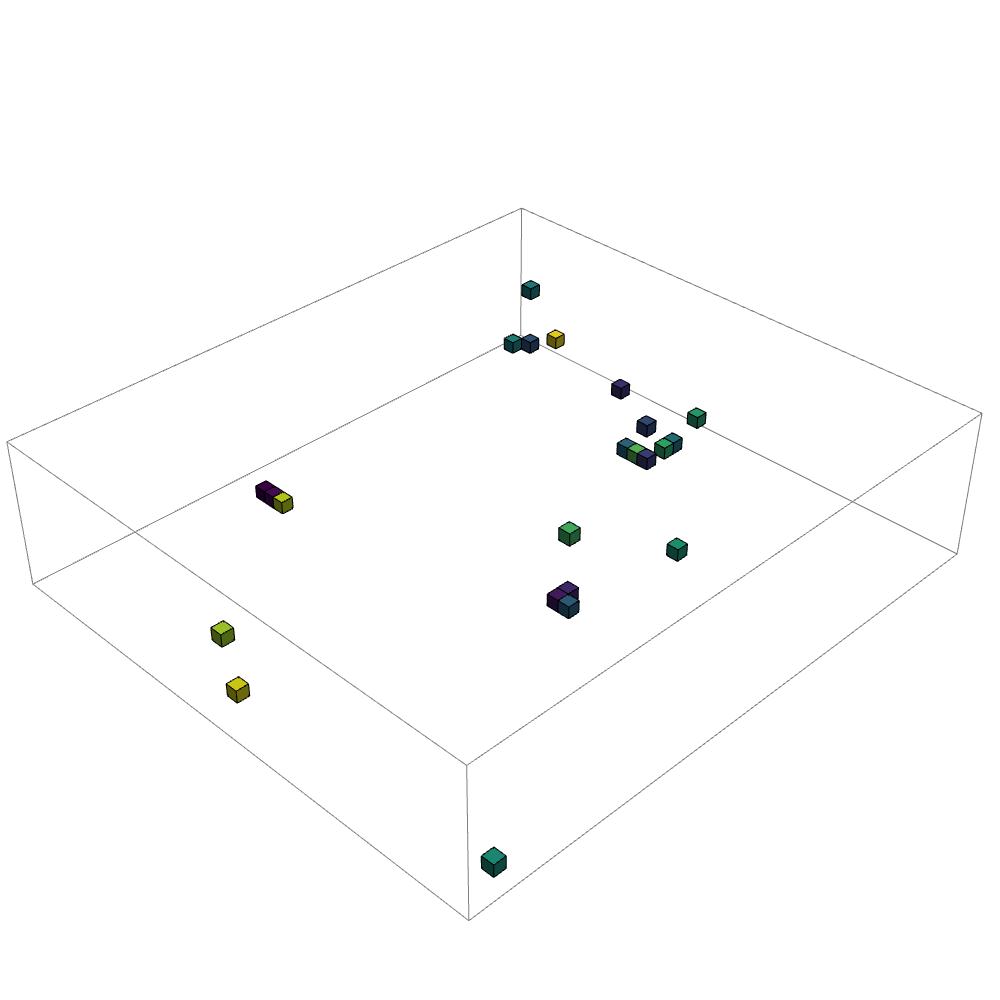
MCDA Seed Allocation
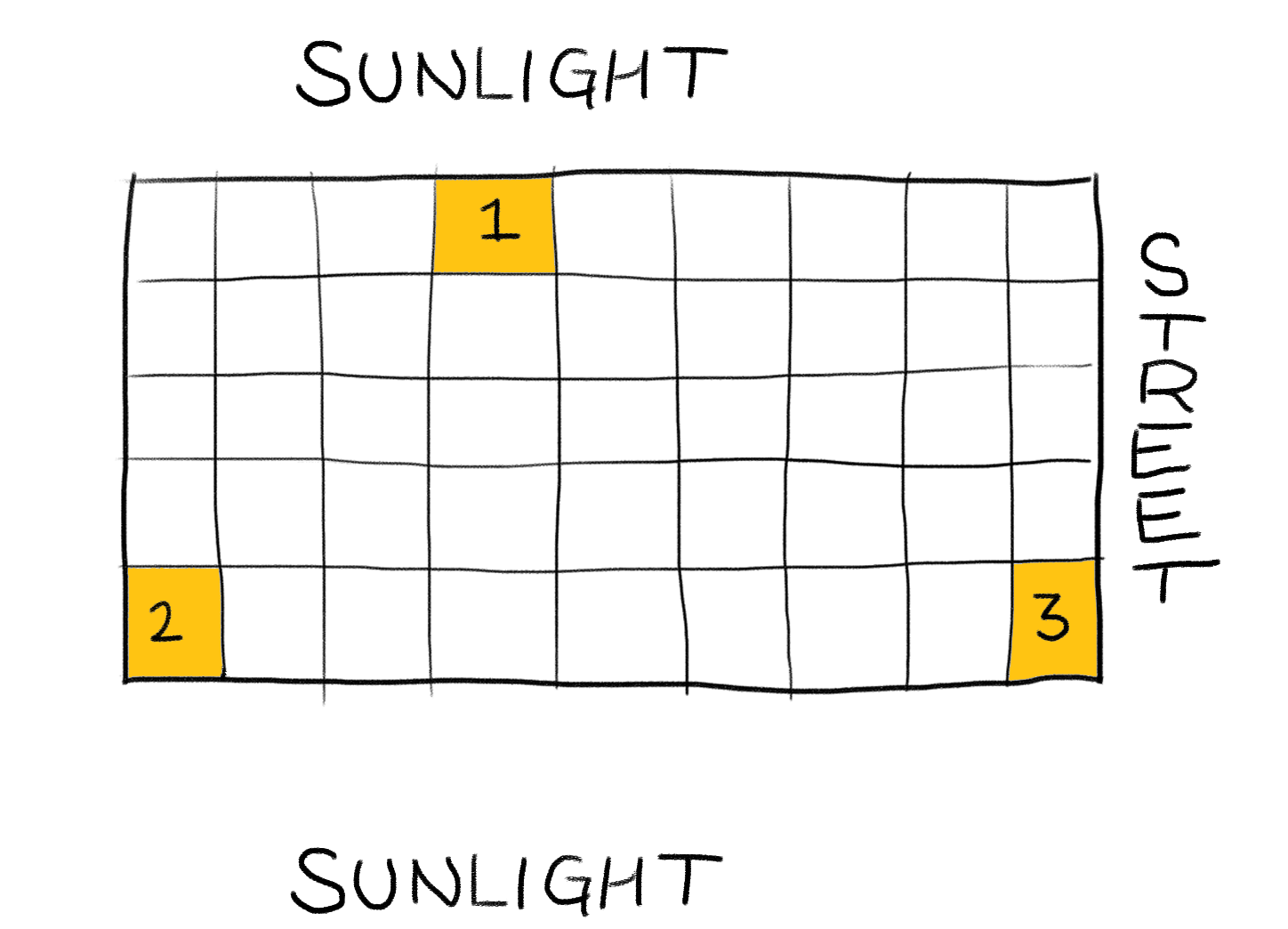
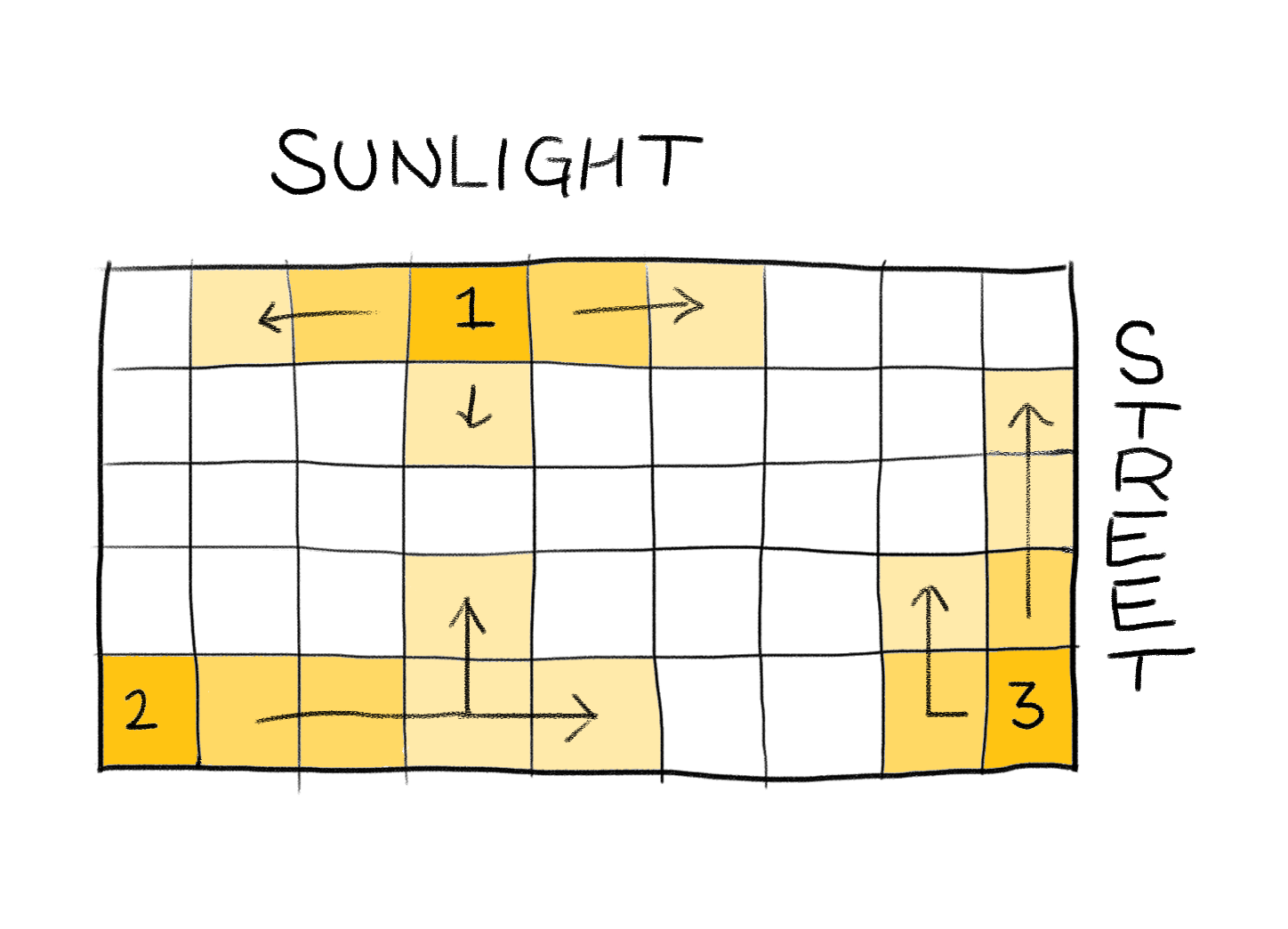
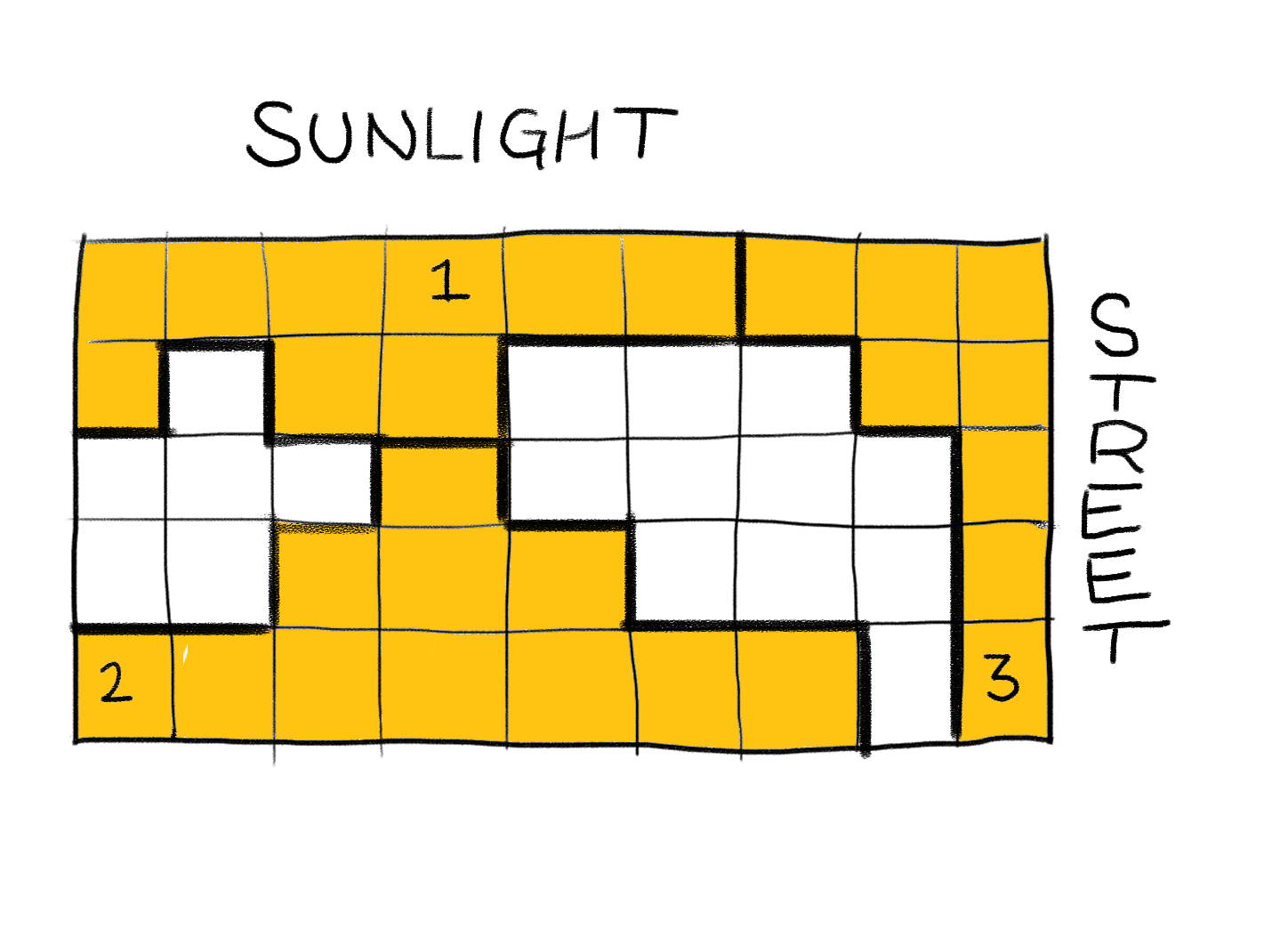
| 1. Initial location | 2. Attraction | 3. Final location |
|---|---|---|
 |
 |
 |
 |
 |
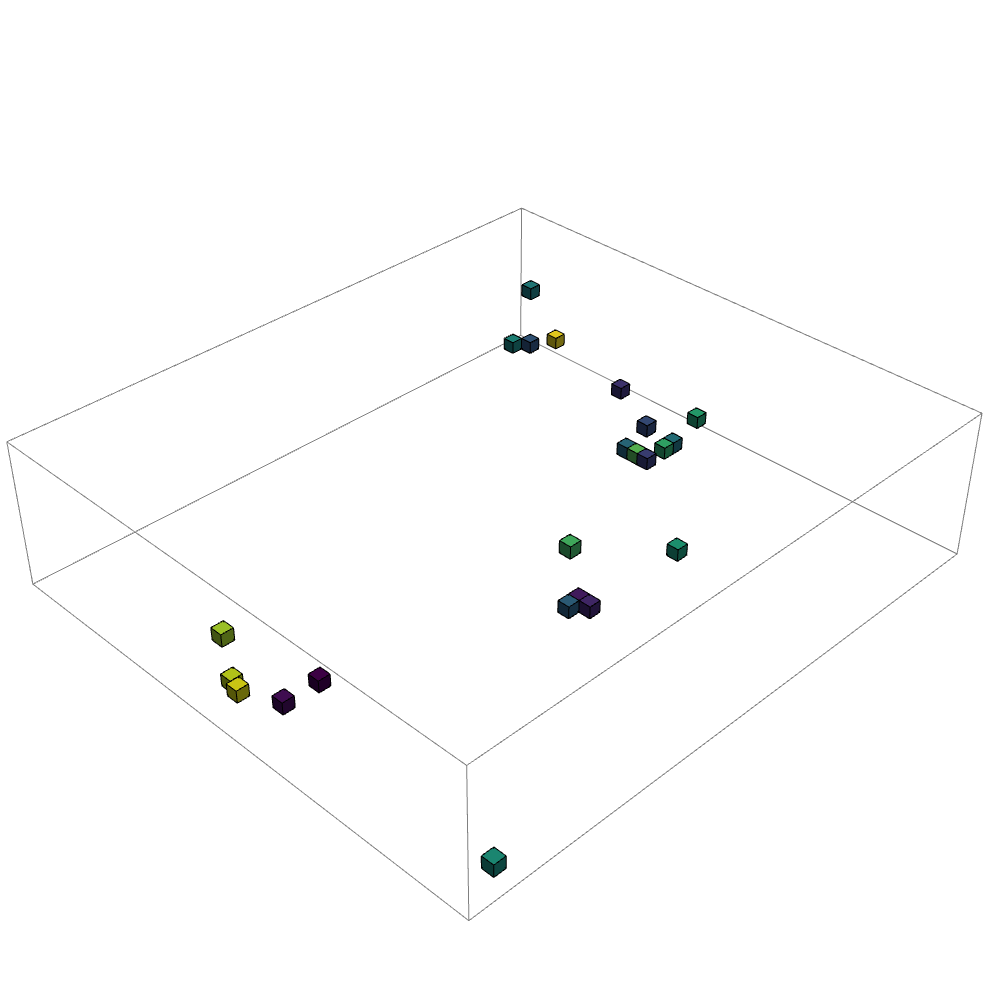 |
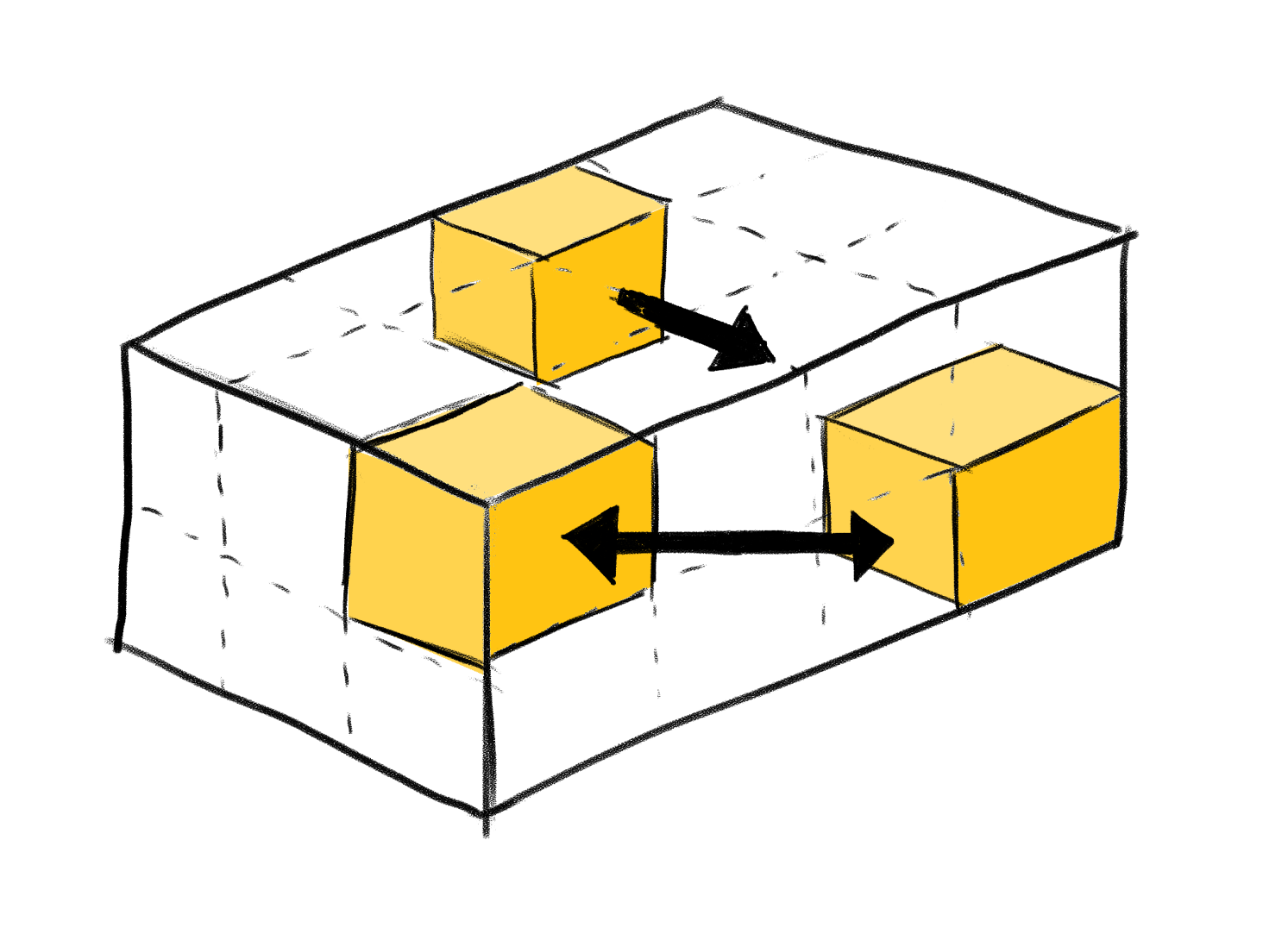
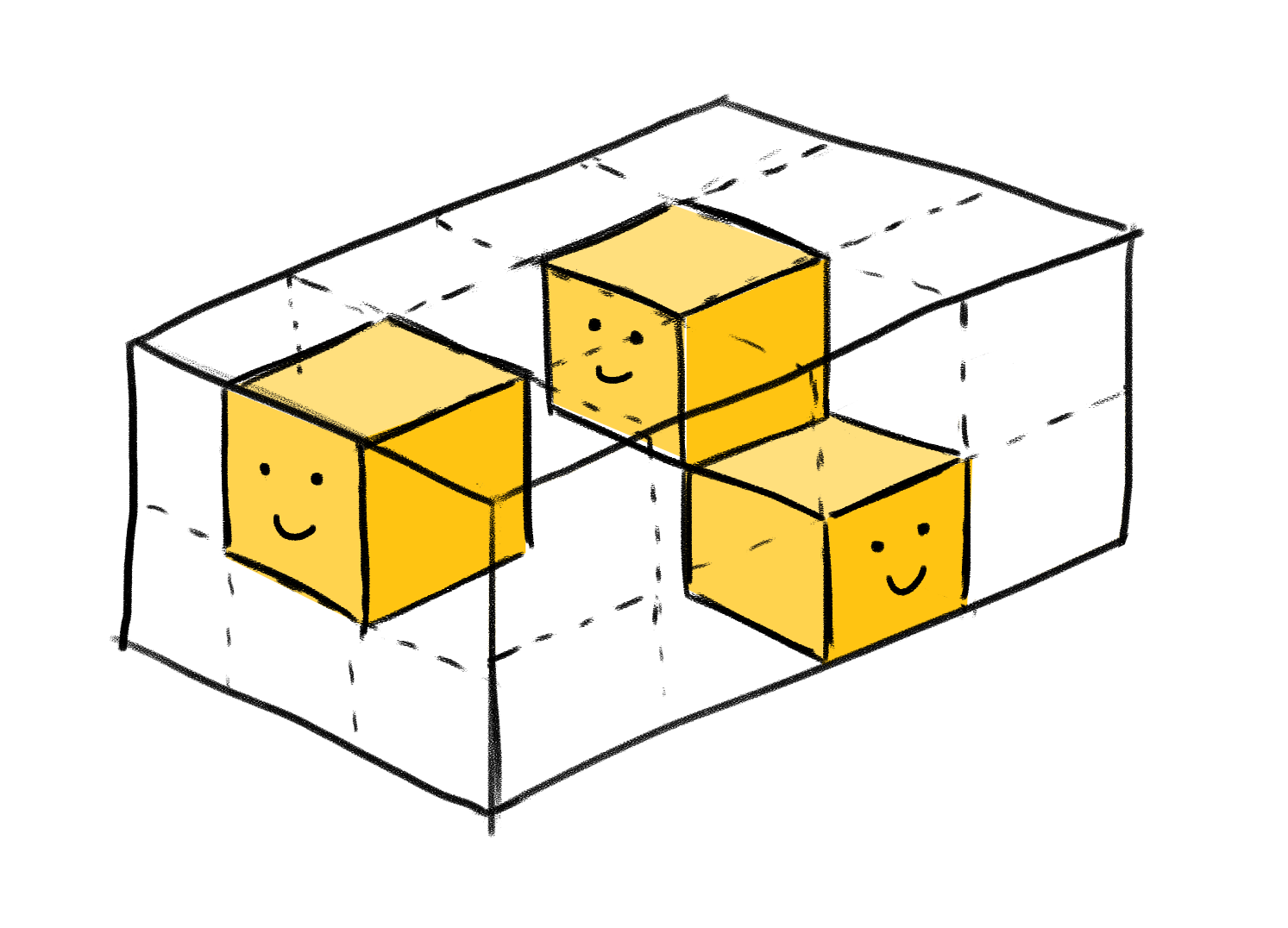
| The location of the seed agents is calculated by looking at the static environmental data: Entrance access, street noise, sky view factor, etc. | The different seed agents are attracted to each other, based on the connectivity matrix. They ‘walk’ around, until they have reached an ideal location based on internal attraction and external data. | The seed agents have reached an equilibrium. |
| Pseudocode | |
|---|---|
| Input | Static env-data, preference and connectivity matrix |
| Output | Seed agent positions |
| Code | def select-neighbours:
def distance-lattice:
for each agent:
while t < threshold:
|
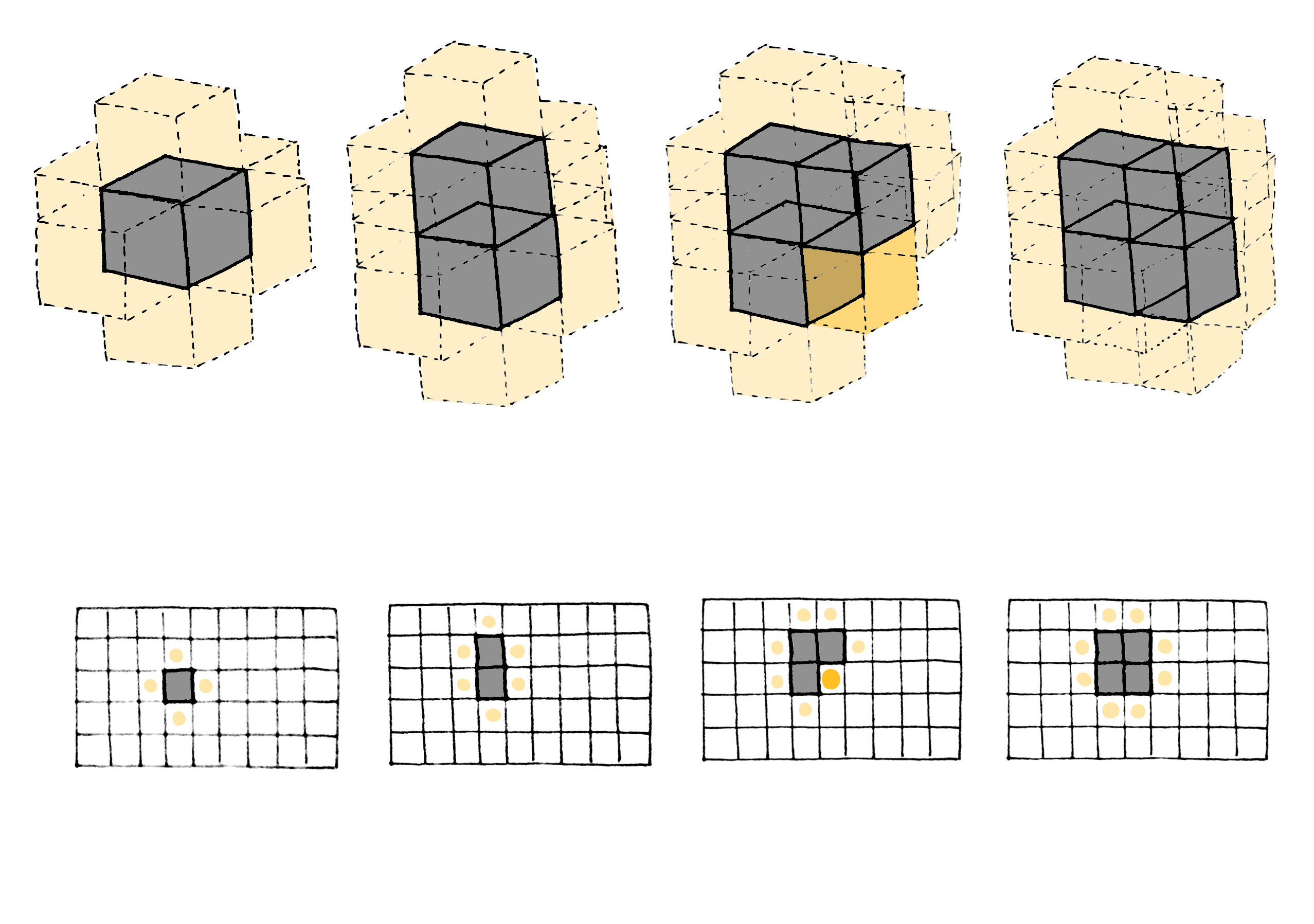
Spatial behaviours: Squareness
If there is the need for a space to be more rectangular, instead of free-form, the squareness algorithm can be used.
| Pseudocode | |
|---|---|
| Input | Voxelized envelope, squareness preferences |
| Output | Impacts the growing algorithm |
| Code | For each agent (during the growth process):
For those voxels that were neighbours to the previous agent, increase the voxel value (the more often a voxel has been a neighbour of an agent, the more the voxel value increases) Select the neighbour with the highest voxel value
|
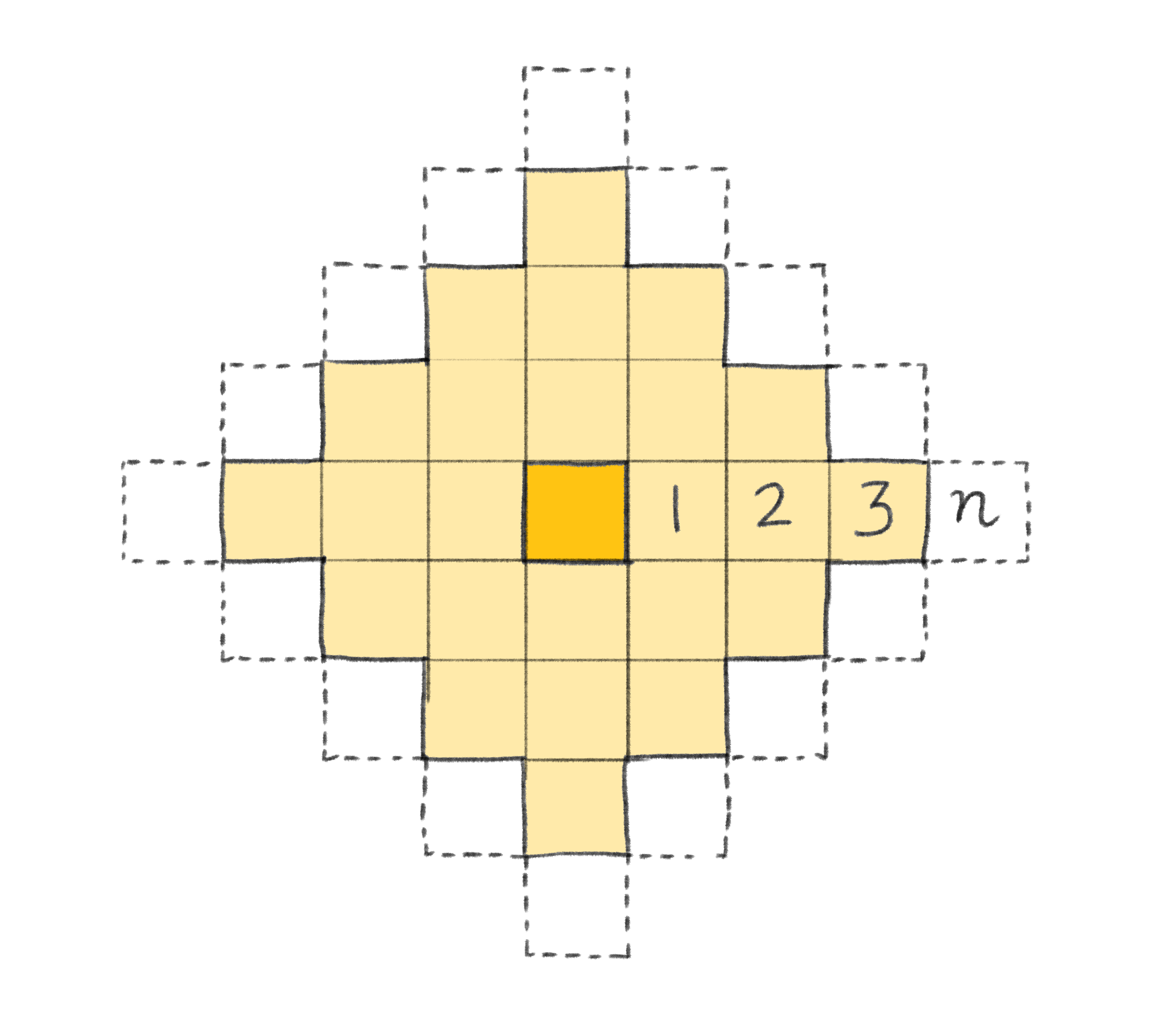
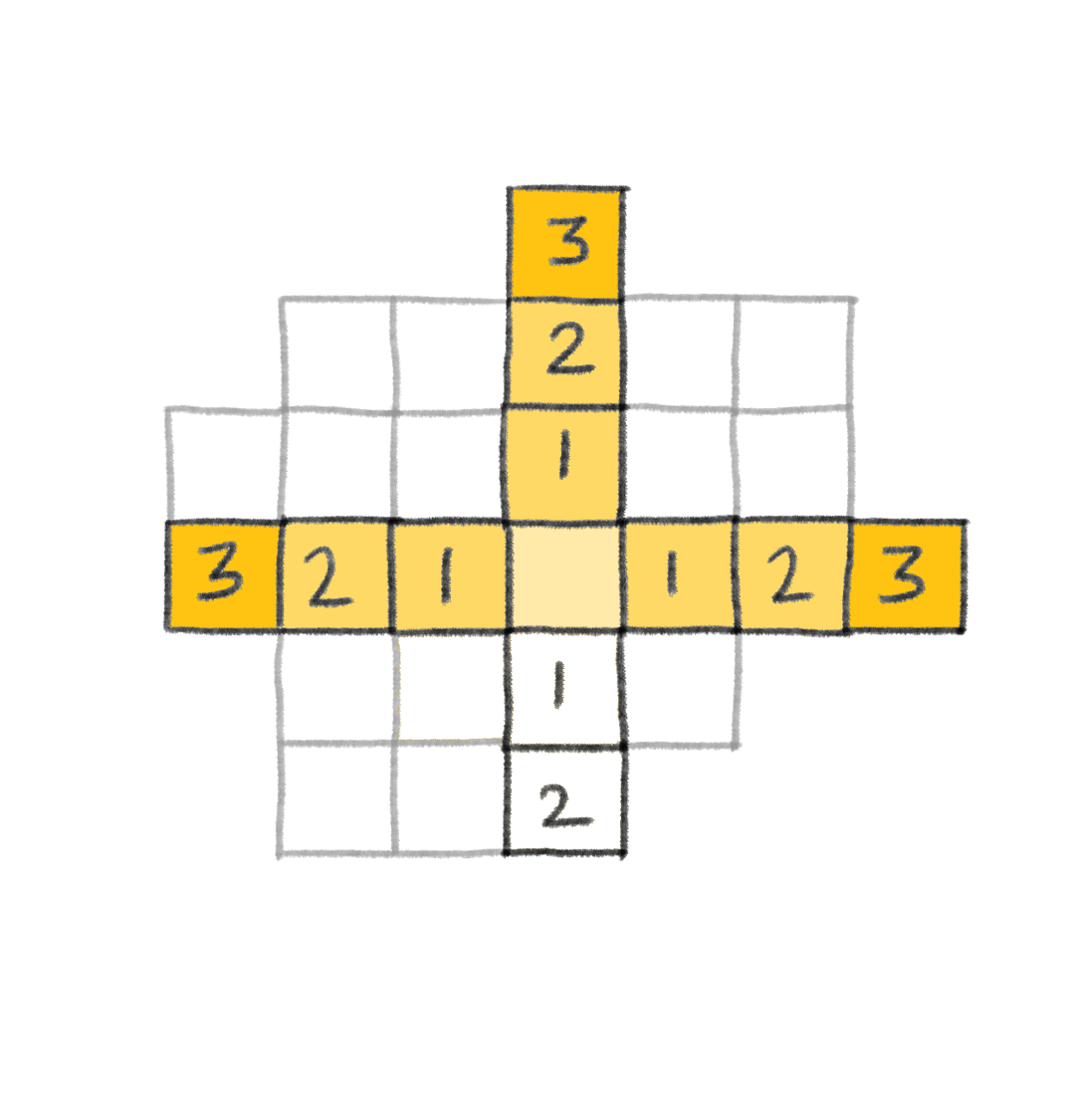
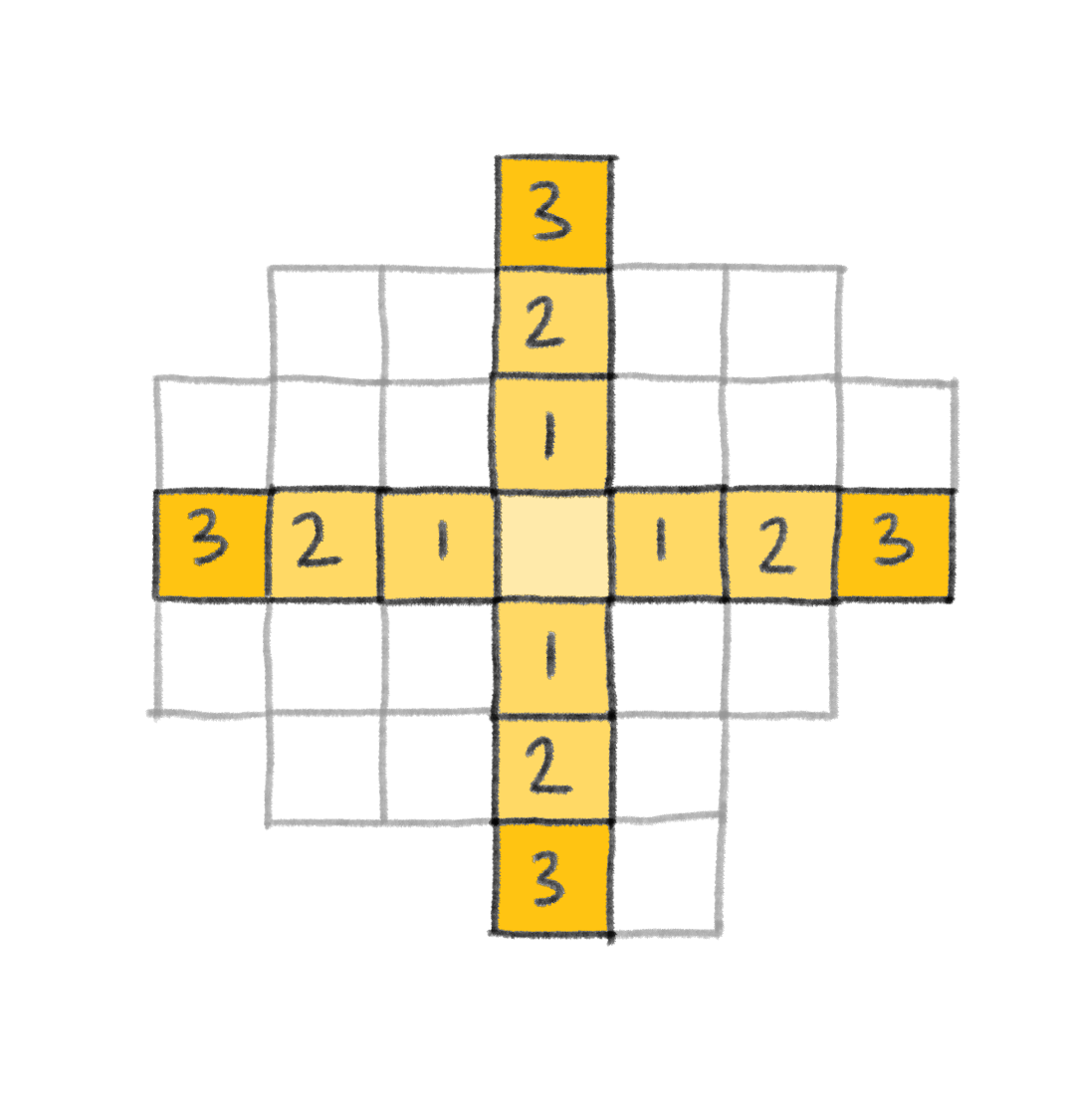
Spatial behaviours: Distance between functions
| Pseudocode | |
|---|---|
| Input | Location of new agent |
| Output | Keep-distance-lattice |
| Code | field = [list of neighbours in a given radius]
### Later on, when determining neighbours if keep-distance[neighbour-location] == agent-ID or -1:
|
Spatial behaviours: Maximum building depth
| 1. | 2. | 3. |
|---|---|---|
 |
 |
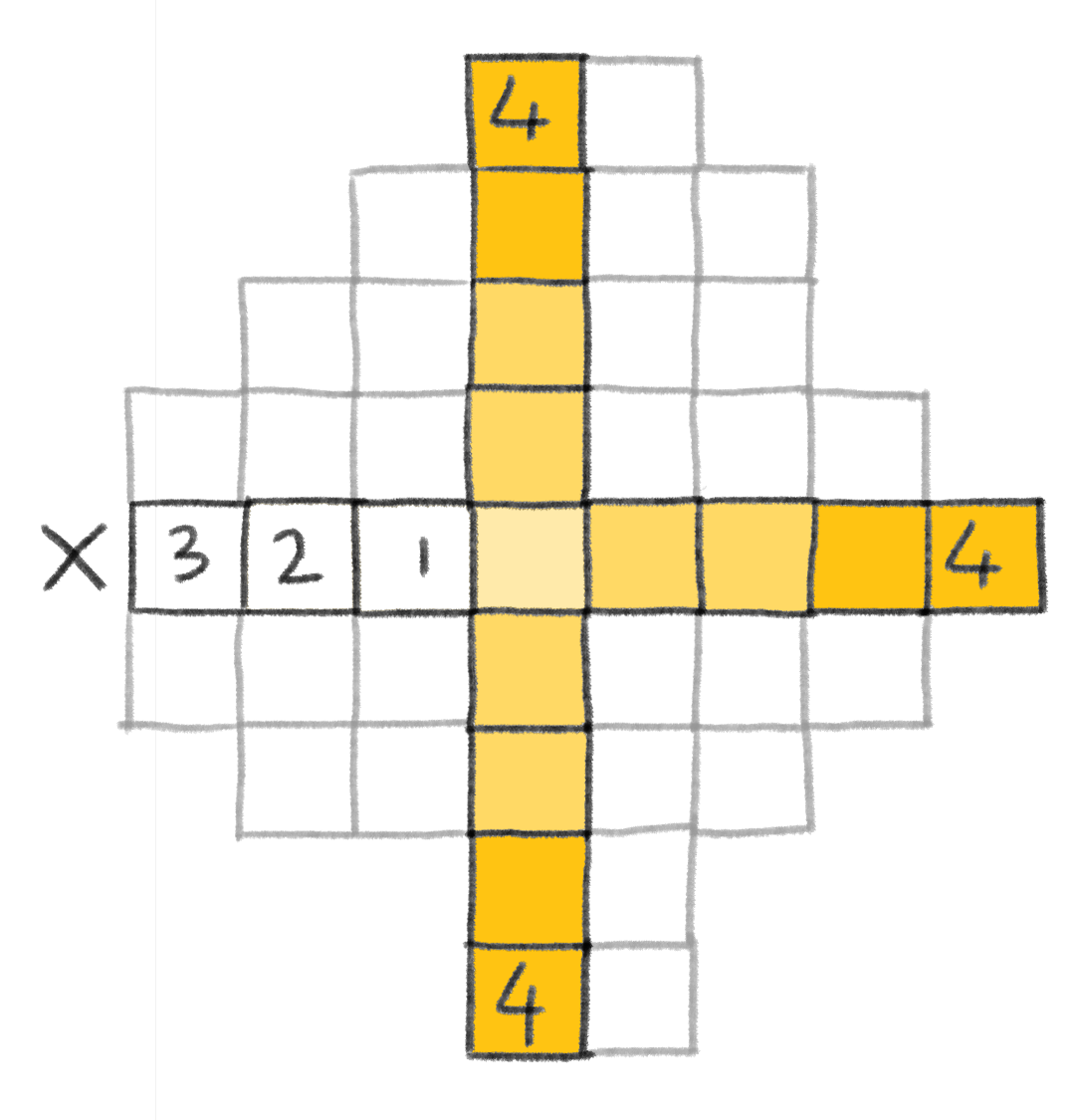 |
| Three directions are filled. | All four directions are filled. | If there is one direction with only three voxels remaining, the fourth voxel is made unavailable. |
| Pseudocode | |
|---|---|
| Input | Agent locations |
| Output | Updates to avail-lattice |
| Code | For each voxel-location of agent:
|
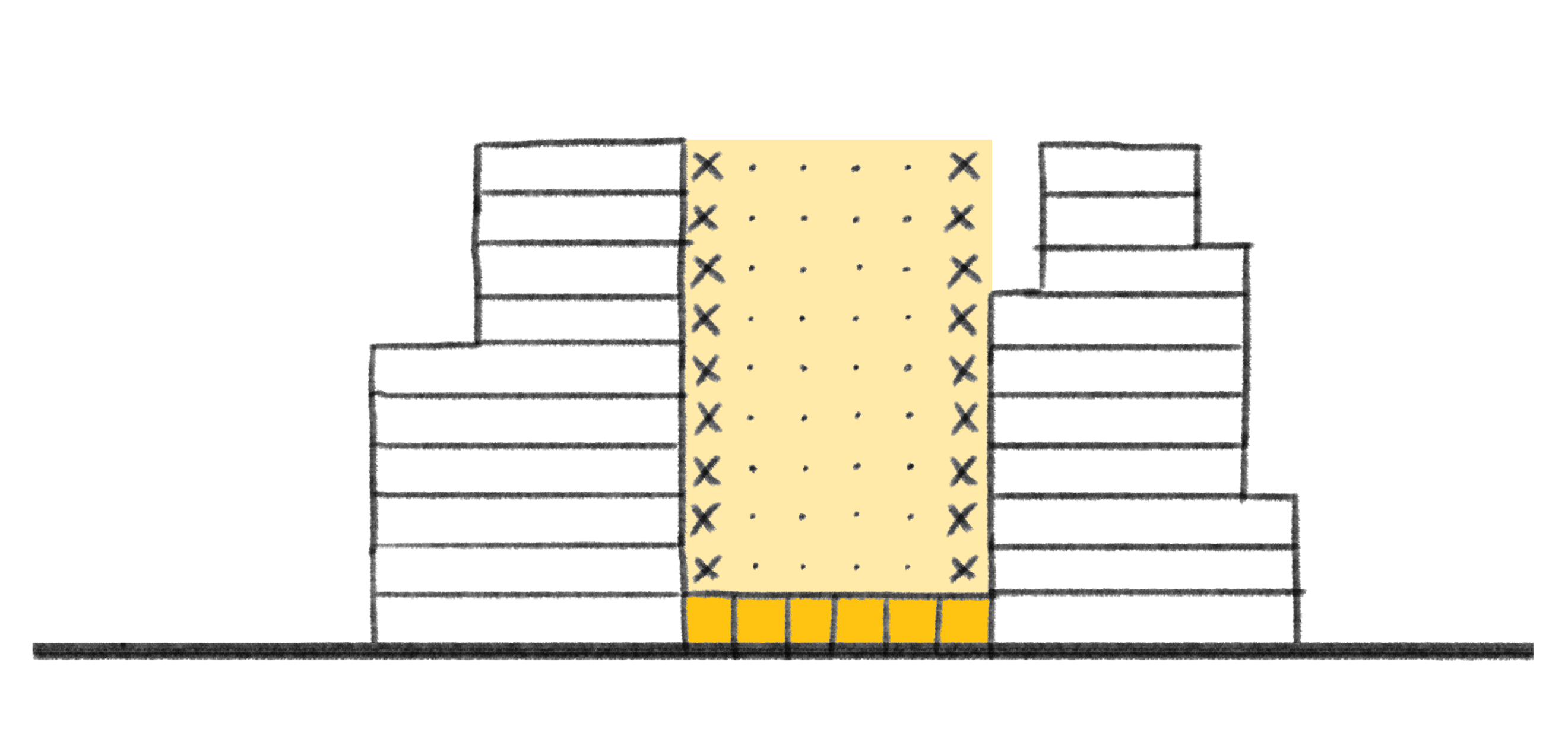
Spatial behaviours: Roof light
| Pseudocode | |
|---|---|
| Input | New agent locations |
| Output | Updates to avail-lattice |
| Code | roof-light = [ list of functions that do not want voxels above them ]
|
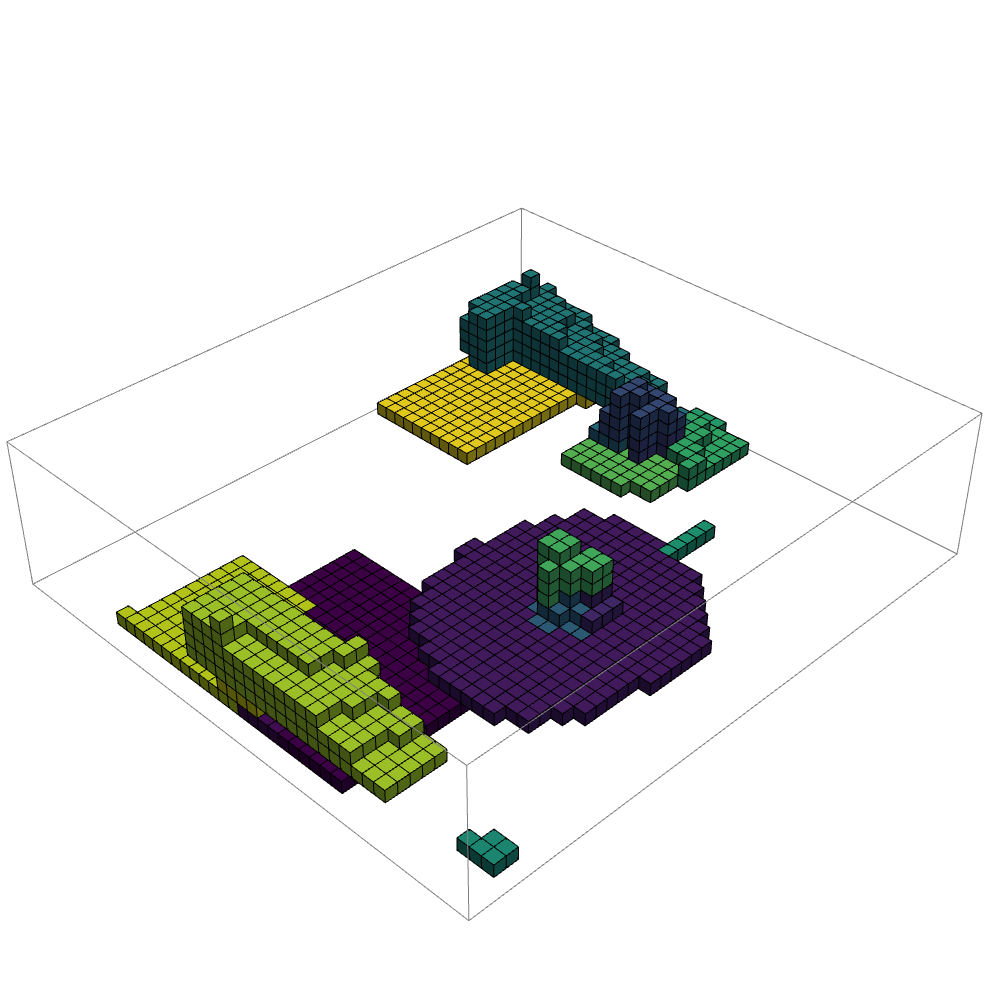
MCDA Growth algorithm
| 1. Starting the growth | 2. Growing | 3. Finished growth |
|---|---|---|
 |
 |
 |
 |
 |
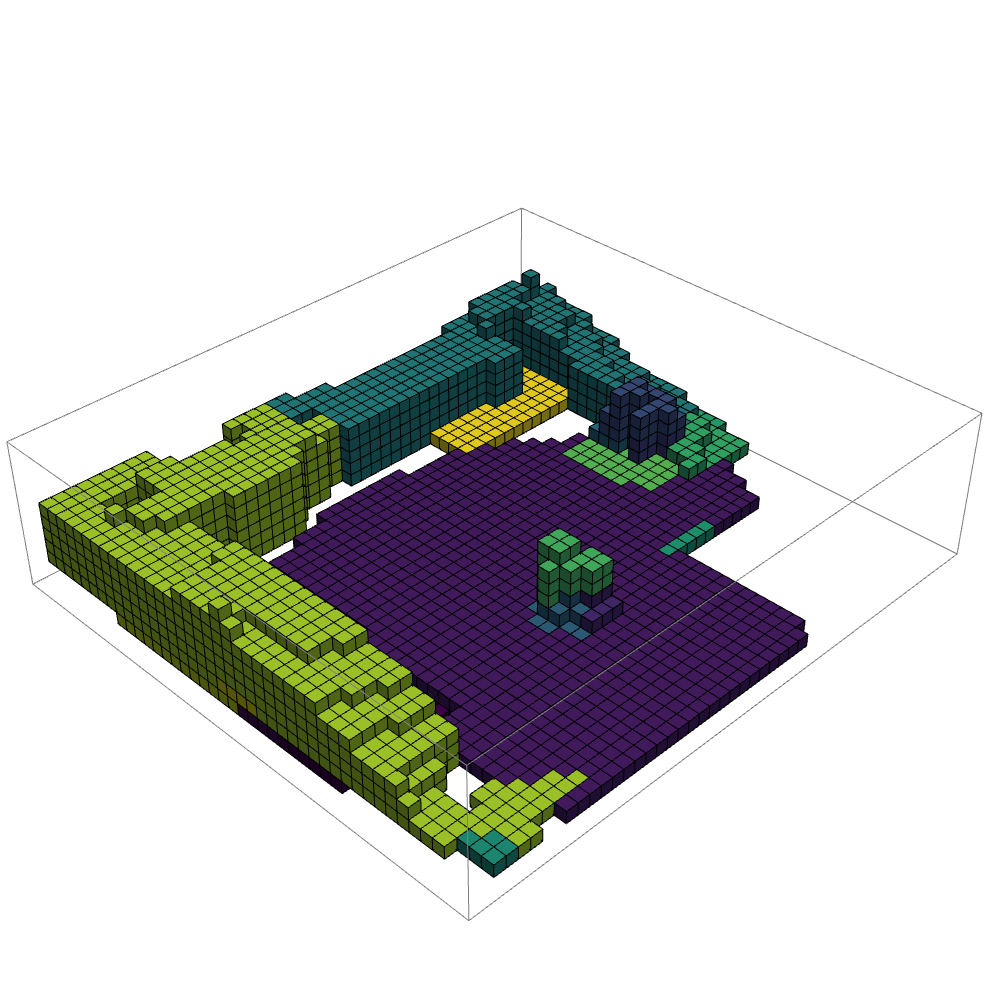 |
| All the agent seeds are evaluated and their best neighbour is chosen based on the static env-data and closeness to other agents. This is done with the connectivity and preference matrix | For each agent, the algorithm evaluates every voxel and calculates all the possible neighbors. The best one is chosen. | The max. number of voxels per agent has been reached, the division of the spaces has ended. |
| Pseudocode | |
|---|---|
| Input | Static env-data, preference and connectivity matrix |
| Output | Occupation lattice |
| Code | while t < threshold:
|
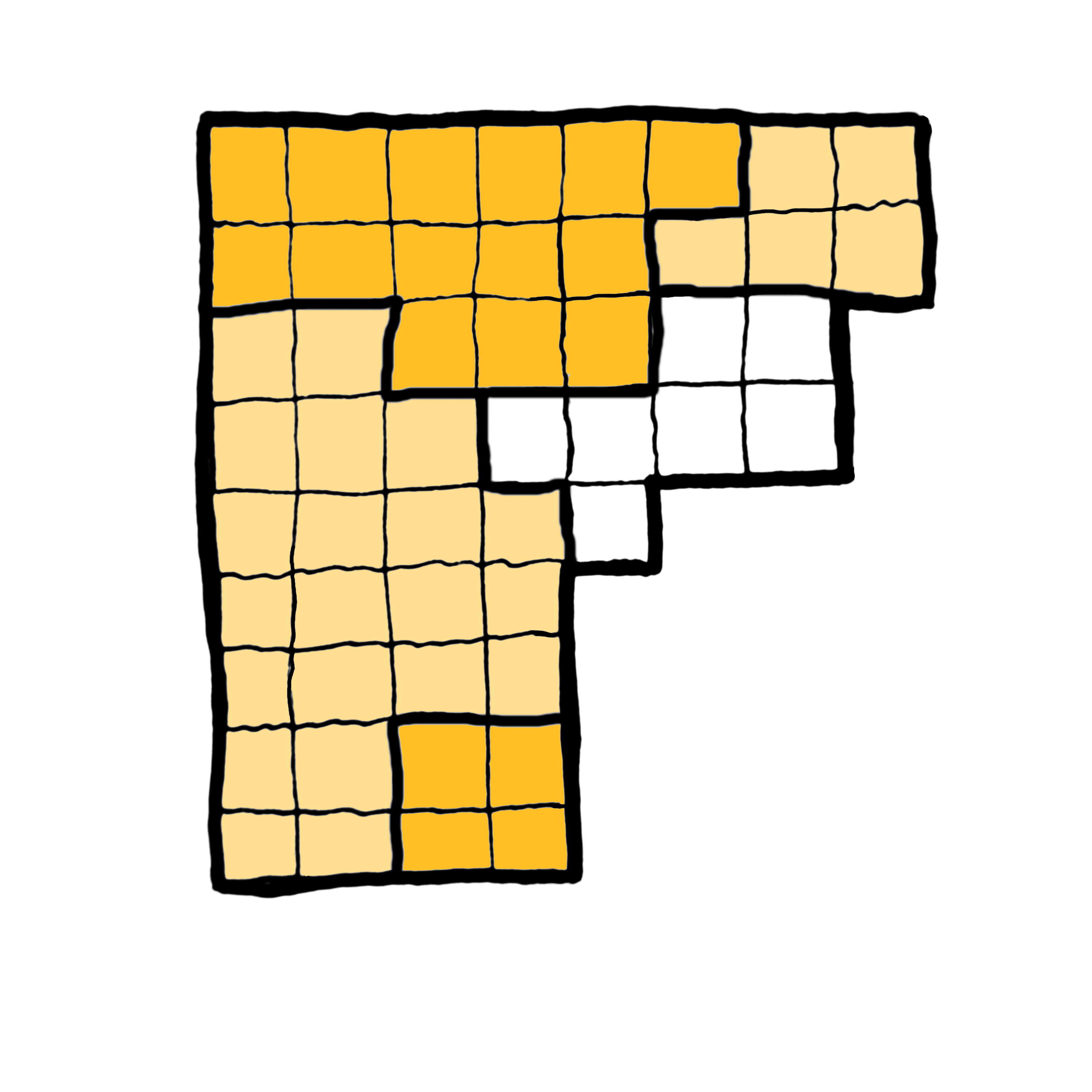
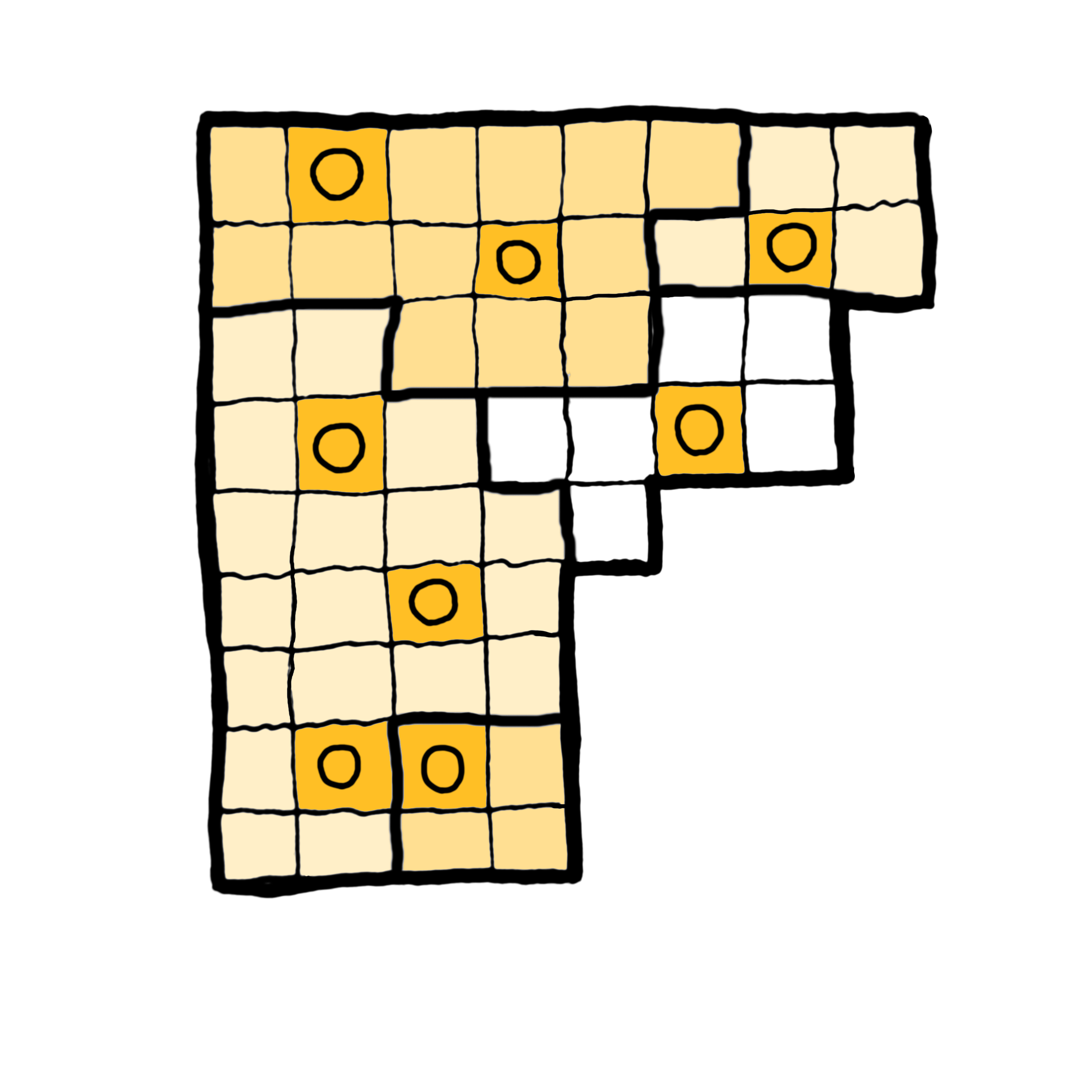
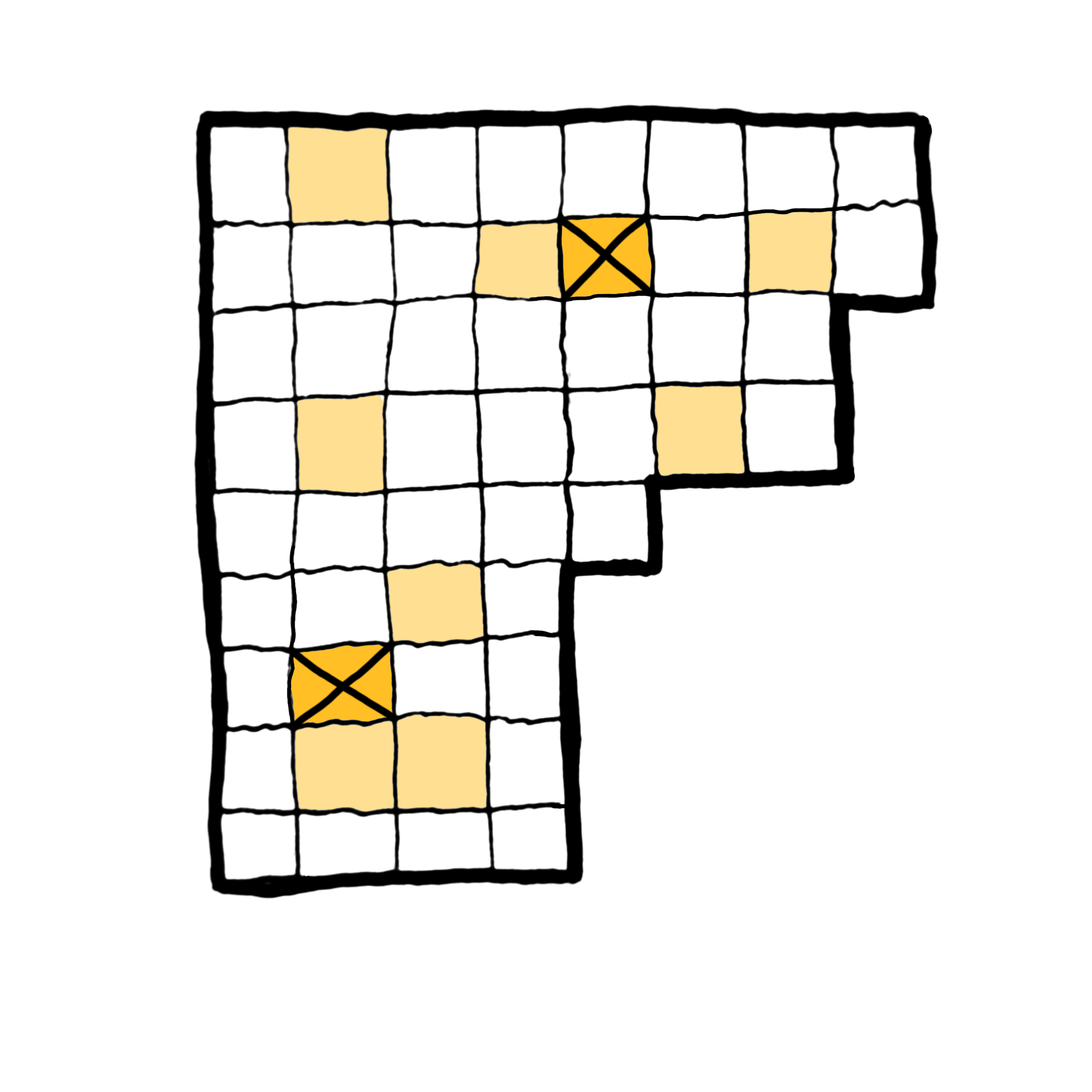
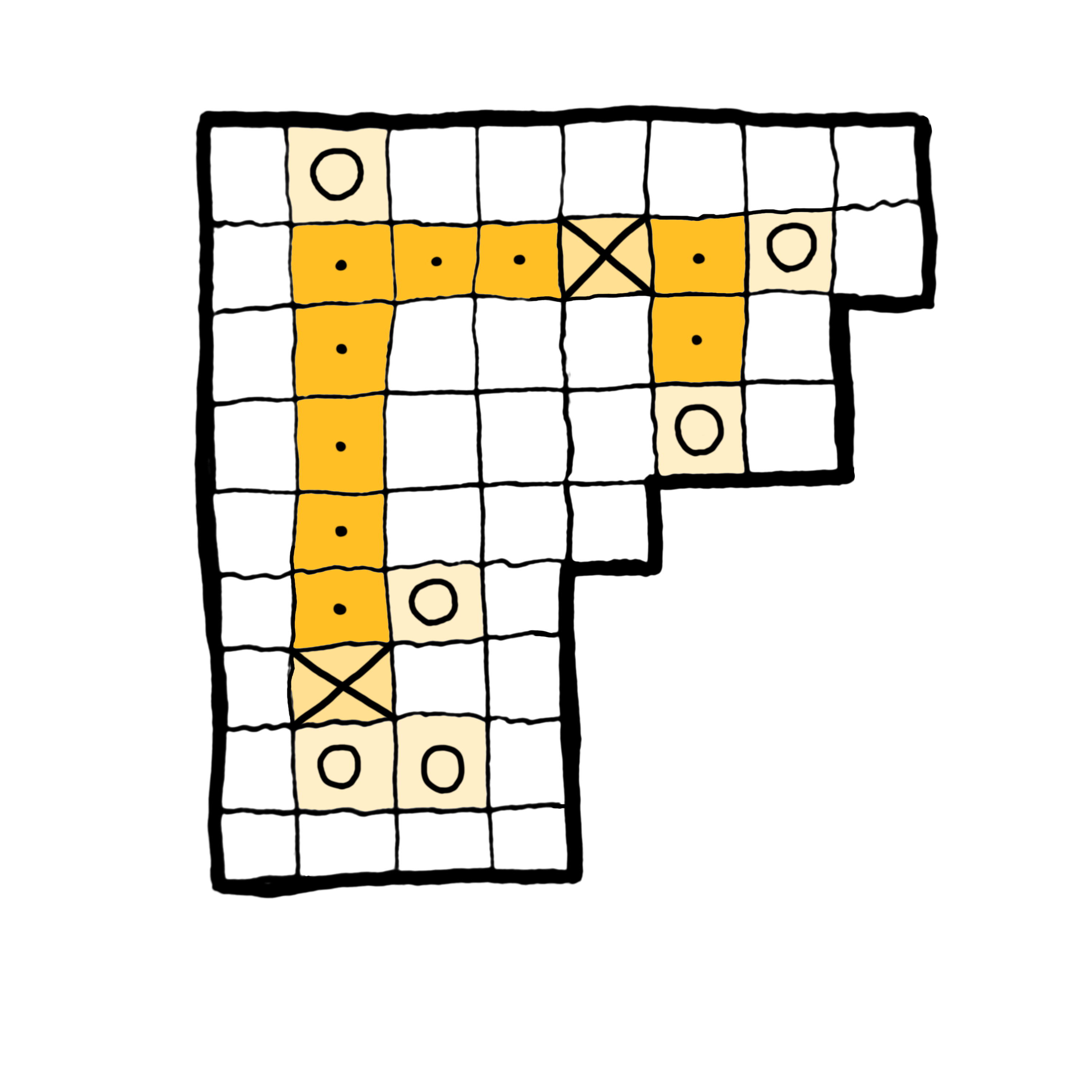
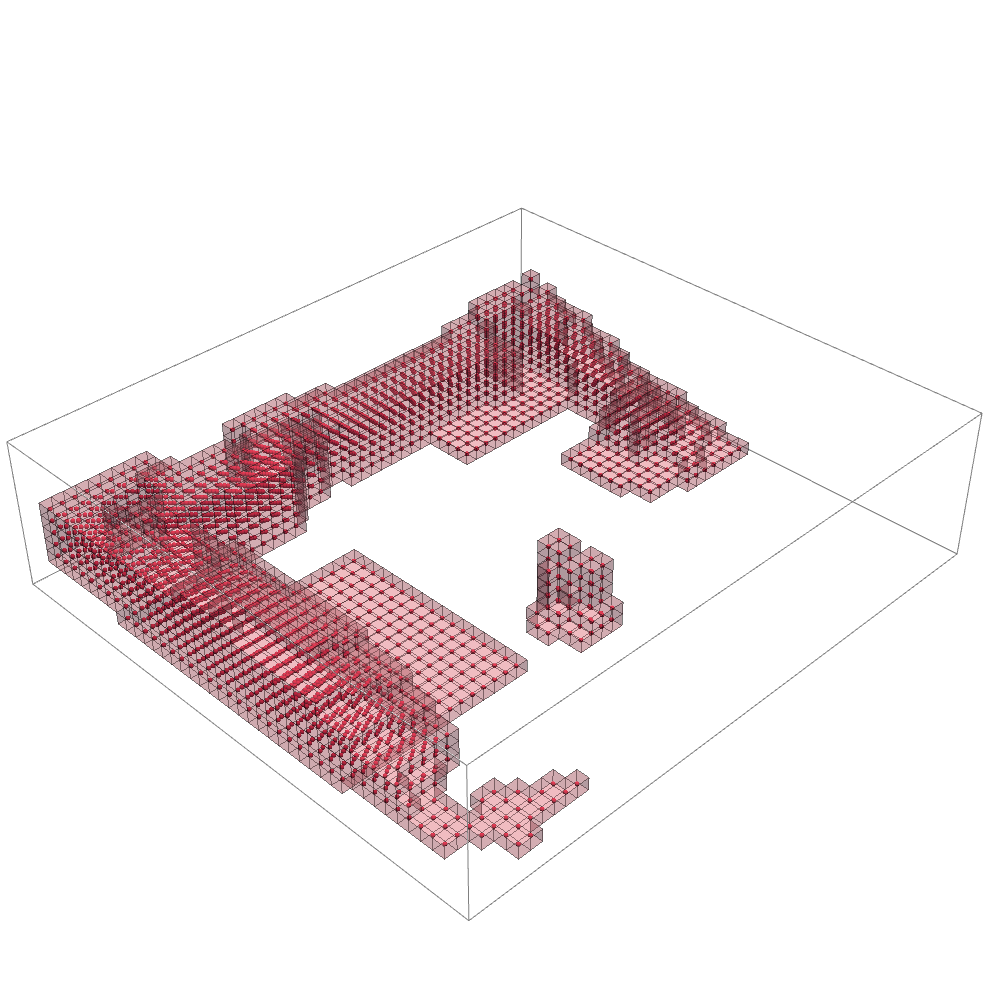
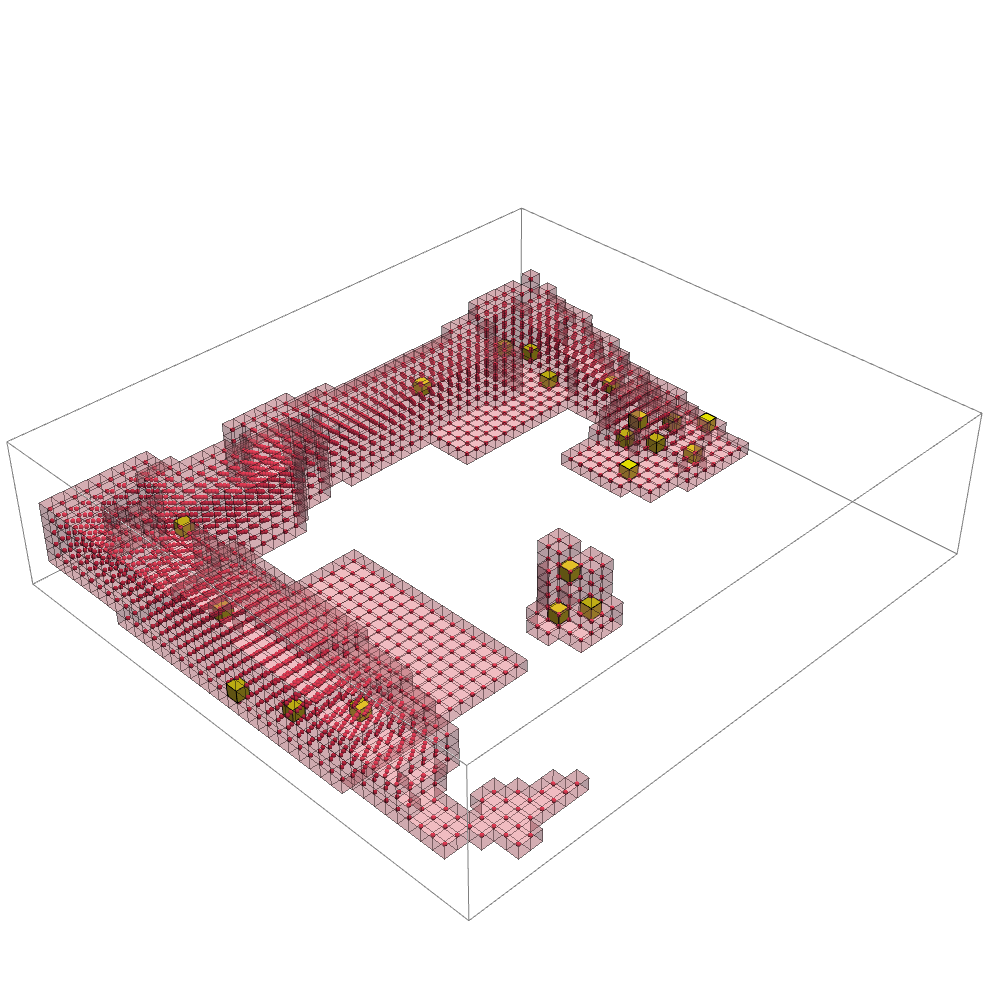
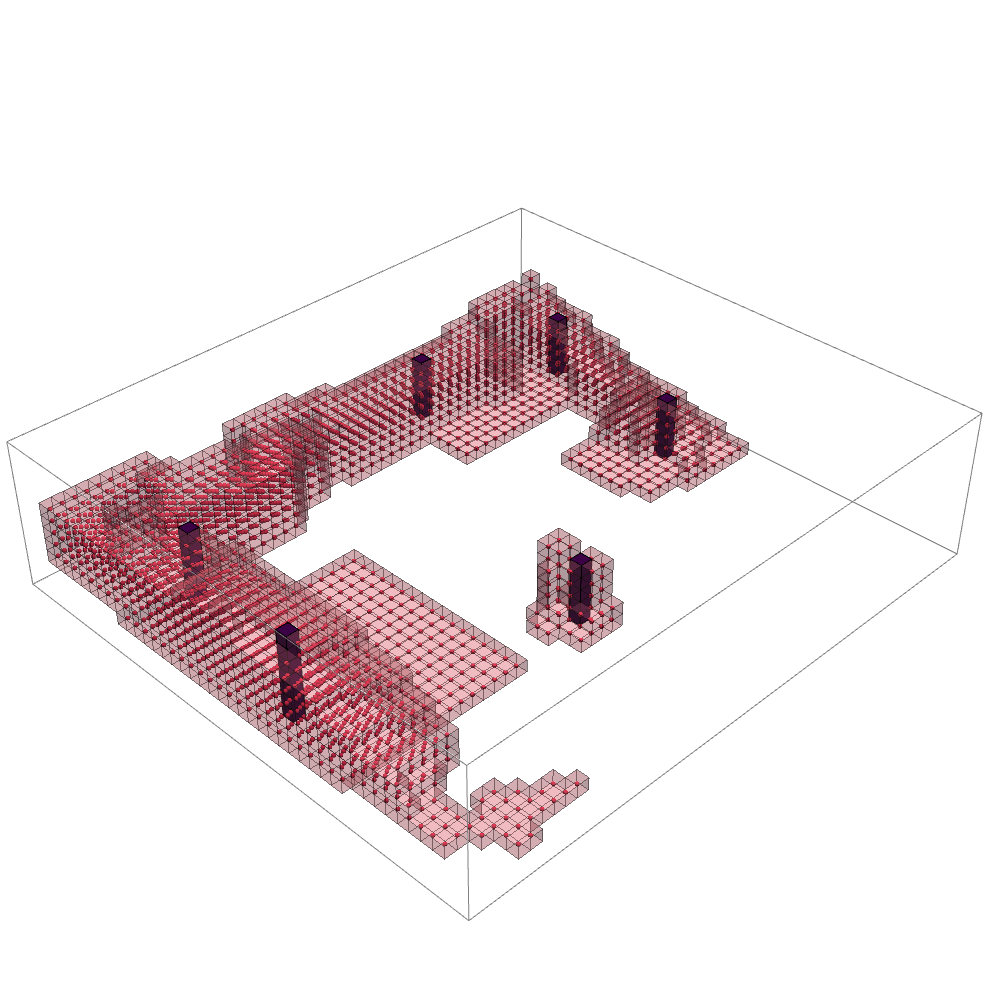
Shafts and corridors growth
| 1. Selecting voxels to evaluate | 2. Finding mean voxels | 3. Mean voxels again | 4. Corridor growth |
|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
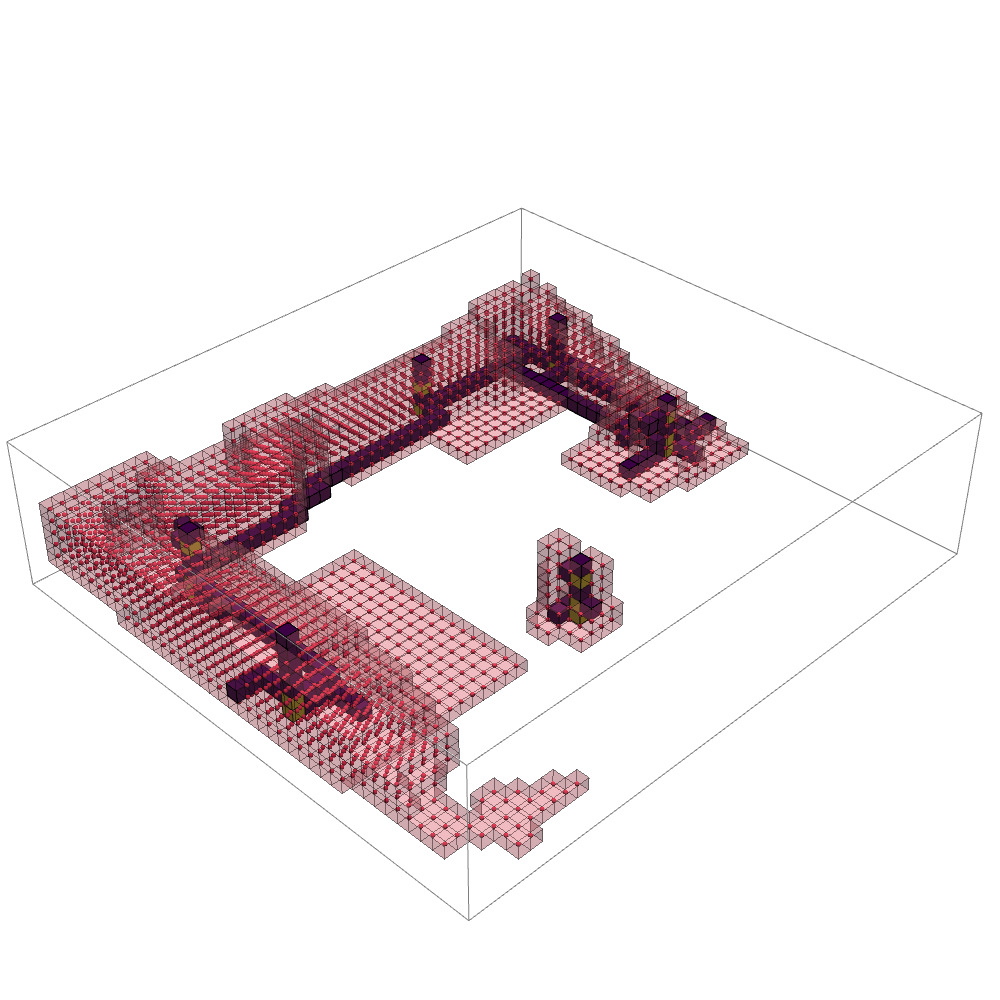 |
| Not all the voxels need a shaft to be placed. The garden for instance would be strange to take into account. | For every function in de occupation lattice, a certain amount of voxels are set, based on the size of each function. Each function has at least 1 mean voxel so that later on corridors can grow and acces all functions. | From the previous mean voxels, new mean voxels are calculated, that will become the shafts inside the new lattice. | Each shaft is connected on the ground floor to the other shafts. Also second corridors grow from each mean voxel to their closest shaft. |
| Pseudocode | |
|---|---|
| Input | Occupation lattice |
| Output | Shafts and corridors lattice |
| Code | Make a boolean lattice for all important voxels from the occupation lattice
export the shafts and corridors lattice |